












آشنایی با روبات «کانادارم دو» ساخته سازمان فضایی کانادا
شهرت کانادا در رقابتهای روباتیک فضایی جهانگیر است؛ رباتهای بزرگی همچون «کانادارم دو» روباتهایی هستند که برای ساخت و تعمیر فضاپیماها در ایستگاه فضایی بینالمللی به کار می رود، در این کشور طراحی شده است.
ربات، دوست و همراه اصلی بشر در فضاست. تنها ابزاری است که زندگی و کار در ماموریتهای فضایی را ممکن می سازد. شهرت کانادا در رقابتهای روباتیک فضایی جهانگیر است؛ رباتهای بزرگی همچون «کانادارم دو» روباتهایی هستند که برای ساخت و تعمیر فضاپیماها در ایستگاه فضایی بینالمللی به کار می رود، در این کشور طراحی شده است. فضانوردان و مهندسان روباتیک برای استفاده از این رباتها در فضا با چه چالشهایی روبروهستند؟

مونترال در کانادا، شهری است که خاطر برنامه های فرهنگی اش شهرت دارد. اما پایتخت استان کبک، همچنین خانه کسانی است که بازوهای مکانیکی ایستگاه فضایی بینالمللی را کنترل می کنند. ربات «کانادرام دو» یکی از سختکوشترین رباتهای فضایی است که تا کنون در ایستگاه فضایی بینالمللی به کار برده شده است.
سازندگان «کانادرام دو» (Canadarm 2) در این آژانس هم آن را کنترل و هدایت می کنند، هم به فضانوردان برای استفاده از آن آموزش می دهند. متیو کارون، مهندس عملیات از اتاق فرمان می تواند برای راندن ربات به فضانوردانی که در فضا هستند دستوراتی بدهد یا اینکه خودش هدایت ربات را در دست بگیرد.

وی که مهندس ارشد عملیات در آژانس فضایی کانادا است میگوید: «بازوی مکانیکی “کانادارم دو” کپسول “دراگون” را میگیرد. این کپسولی است که آب و مواد مورد نیاز فضانوردان را به ایستگاه میآورد. اما این کپسول نمیتواند به ایستگاه فضایی متصل شود، در نتیجه باید سرعت و جهت آن را با ایستگاه فضایی یکی کرد و وقتی کپسول به ۱۰ متری ایستگاه فضایی رسید، فضانوردان از داخل ایستگاه کپسول “اسپیس ایکس” را با بازوی مکانیکی “کانادارم دو” خواهند گرفت. این کار باید با سرعت انجام شود در غیر این صورت کوچکترین اختلالی باعث خواهد شد که کپسول به سرعت از ایستگاه دور شود.»
کانادا از دهه ۱۹۷۰ میلادی با آژانس فضایی اروپا همکاری می کند و «کانادارم»، اولین ربات فضایی خود را در سال ۱۹۸۱ با شاتل فضایی آمریکا به فضا فرستاد.

استفان دژاردن، مدیر بخش توسعه اکتشافات فضایی در آژانس فضایی کانادا می گوید: «ناسا درخواست کرده بود که برای شاتل فضایی بازوی مکانیکی ساخته شود. طراحی و ساخت بازو در کانادا انجام شد. از آن به بعد هر شاتل بازویی فضایی داشت که در بیشتر مأموریت های فضایی شاتل به کار برده شد. وقتی زمان طراحی ایستگاه بینالمللی فضایی رسید، کانادا پیشنهاد کرد که بازوی مکانیکی جدیدی برای ایستگاه فضایی ساخته شود که “کانادارم دو” نامیده شد.»

کریس هدفیلد، اولین شهروند کانادایی که پا به فضا گذاشت می گوید که این بازوی مکانیکی و دکستر که ربات سرویس متحرک ایستگاه فضایی است، مایه اقتخار کشورش است: «“کانادارم دو” ساخت کاناداست و این ایستگاه فضایی را هم همین ربات ساخته است. همه ما به موضوع افتخار می کنیم.»
همه فضانوردان آژانس فضایی اروپا و ناسا، سازمان فضایی ملی ایالات متحدهٔ آمریکا باید در ایستگاه روباتیک کانادا آموزش ببینند.


آموزشها با ماکتی از ایستگاه فضایی بینالمللی شروع می شود. کومودو جیناداسا، مهندس روباتیک هم مسئول آموزش فضانوردان درباره نحوه آموزش می گوید: «در این محل مدلی داریم که فضانوردان پیکربندی آن را تنطیم می کنند و می توانند آن را به این طرف و آن طرف حرکت بدهند. زوایای مختلف چرخش (حول محورهای عمودی و طولی وعرضی) را در هر کدام از مفصلها، تنظیم می کنند. پس از انجام عملیات پیکربندی اولیه، آن را روی ایستگاه فضایی عملیاتی و در آخر هم حرکت بازوی مکانیکی را در حین انجام عملیات دنبال می کنند.»
وی می گوید که سوار کردن قطعات خیلی مهم است چون هر نوع برخوردی در فضا فاجعه به بار می آورد: «سوار کردن قطعات مهم است. چون نمی خواهیم که در فضا هیچ برخوردی رخ دهد، نه برخوردی بین رباتها و قطعاتشان و نه برخوردی بین رباتها و فضاپیماها. چنین برخوردهایی فاجعه بار خواهد بود. برخورد با ایستگاه فضایی هم منجر به کاهش سریع فشار گاز می شود و ما را با وضعیت اضطراری جدی رو به رو خواهد کرد.»
مهندسان آژانس فضایی کانادا، علاوه بر کار روی روبات «کانادرام» مشغول ساخت رباتهای ماهنورد و مریخنورد نیز هستند.
ژان کلود پیدبوف، مدیر بخش فناوری و علوم فضایی در آژانس فضایی کانادا در این باره توضیح می دهد: «این سیاره نوردی است که با شرکتهای کانادایی طراحی کرده ایم. هدفمان هم این است که ببینیم آیا می توان از این نوع وسیله ها برای اکتشافات سیاره ای استفاده کنیم یا نه. مقصدمان هم ماه و مریخ است. همانطور که می بینید، چرخهای آن برای سطح این دو سیاره مناسب است. باید به دنبال چرخهایی باشیم برای دمای ۱۵۰ و۲۰۰ درجه سانتیگراد زیر صفر مناسب و در این دما مقاوم باشد. در این دما چرخهای لاستیکی کار نمی کنند، به همین دلیل هم باید از چرخهایی استفده کنیم که در مقابل موانع بسیار مقاوم باشند.»

چشمانداز درازمدت این است که این سیاره نوردها به مته و ابزار کار در معدن مجهز شوند تا بتوان منابعی را که برای زنده ماندن انسان در فضا لازم است، جستجو کرد.
ژان کلود پیدبوف می افزاید: «اگر بتوانیم آب روی ماه پیدا کنیم، این امکان هست که روی ماه پایگاه داشته باشیم، سوخت و اکسیژن درست کنیم. قبلا نشان داده شده که مقادیر بسیار کم آب، در ماه وجود دارد. گام بعدی این خواهد بود که نشان دهیم آیا می توان این این آب را استخراج کرد، و آیا می توان با مقادیر کافی از آن کاری انجام داد یا نه. بنابراین این مأموریتی است که از عهده ما بر می آید و کاوش بیشتر در ماه را امکانپذیر می کند.»
تاریخچه علم رباتیک در فضا داستان همکاری نزدیک انسان و ماشین است، اما آینده نشان از کار مستقل ابزارها و روبات هایی دارد که از راه دور کنترل می شوند و فضانوردان را از کارهای پرخطر دور نگه می دارد.
متیو کارون می گوید: «اگر بتوان با ربات کاری انجام داد، از ما میخواهند که ربات برای آن کار بسازیم. صحبت از برش یا جابجا کردن پوشش گرمایی، باز کردن درپوش، بریدن تسمه اتصال، حتی آوردن نازل سر شلنگ، (وسیله ای برای کنترل جریان سیال) و ریختن سوخت در ماهواره است. همه اینها نوید آینده ای روشن برای علم رباتیک را می دهد.»
استفان دژاردن، مدیر بخش توسعه اکتشافات فضایی در آژانس فضایی کانادا می گوید که در درازمدت کانادا و دیگر کشورهای همکار در پروژه ایستگاه فضایی بین المللی قصد دارند ایستگاه فضایی در فضای دورتر از زمین در اعماق فضا بسازند.

وی می افزاید: «گام بعدی این است که دورتر برویم. صحبت از ساخت ایستگاه فضایی بین زمین و مدار ماه است و در اینجا هم برای ساختن محیطی که برای فضانوردان قابل زیست باشد، نیاز به روبات فضایی خواهد بود.»
منبع: یورونیوز





 22 فروردین ماه 1405
22 فروردین ماه 1405
پایان سفر آرتمیس ۲، فرود در اقیانوس آرام 20 فروردین ماه 1405
20 فروردین ماه 1405
تصاویر خیرهکننده فضانوردان آرتمیس ۲ از سمت دور ماه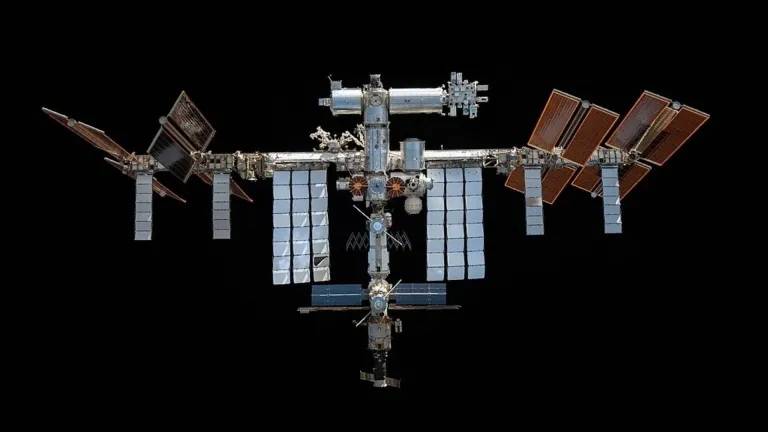 17 فروردین ماه 1405
17 فروردین ماه 1405
۱۰ گرانقیمتترین فناوری ساخت بشر: از ایستگاه فضایی بینالمللی تا مریخنورد استقامت 15 فروردین ماه 1405
15 فروردین ماه 1405
پرتاب فضاپیمای اوریون به دور ماه با ۴ فضانورد / نخستین تصاویر چشمگیر فضانوردان «آرتمیس 2» از زمین 10 فروردین ماه 1405
10 فروردین ماه 1405
۷ فاجعه فضایی که تا کنون رقم خورده است 18 بهمن ماه 1404
18 بهمن ماه 1404
توقف پروازهای گردشگری فضایی بلو اوریجین حداقل به مدت ۲ سال برای تمرکز بر برنامههای ماه