












رونمایی از نمونه مفهومی خودرو پرنده ایرباس تا پایان 2017 (+تصاویر)
ایرباس را همه با هواپیماهای غولپیکرش میشناسند اما کمتر کسی میداند که این شرکت هواپیماسازی در حال کار روی یک خودرو پرنده خودران کوچک تکنفره است و پایان امسال میلادی از نمونه اولیه آن رونمایی خواهد کرد.
سفر مجازی به مریخ، هدیه تسلا به مناسبت کریسمس
هدیه دوم برای صاحبان خودروهای مدل S و X که از بهروز رسانیها استفاده کردهاند، امکان تبدیل خودروی آنها به یک فضاپیمای مریخی است. اسپیسایکس، شرکت خواهرخوانده تسلا، در حال طراحی برای ارسال انسانها به سیاره سرخ است.

پروژهی واهانا، تاکسی پرندهی خودران شرکت ایرباس
پروژه واهانا از ماه فوریه آغاز شد و قرار است نخستین پرواز آزمایشی آن در اواخر سال 2017 انجام شود. به رغم جوان بودن نسبی این پروژه، ایرباس در مورد آیندهای که کارمندان با استفاده از یک پهپاد در محل کار خود حاضر میشوند، خوشبین است.

هلیتاکسی، تاکسی پرندهی خودران شرکت ایروینچی (+تصاویر)
یک شرکت کانادایی برای حل معضل ترافیک و حمل و نقل مسافران، بالگردی با قابلیت هدایت خودکار طراحی کرده است که به زودی نخستین پرواز آزمایشی آن انجام می شود.

کنفرانس بین المللی ناوبری، آذر 1395
کنفرانس بینالمللی ناوبری در تاریخ آذر 1395 در جزیره کیش، پردیس بینالملل دانشگاه صنعتی شریف، برگزار میشود. محورهای این کنفرانس شامل سنسورها و سختافزار، الگوریتمها و روشها، و کابردرها (هوافضا، دریا، خودرو، نقشهبرداری) میباشد.

جزئیات سفر انسان به مریخ از زبان الون ماسک، مالک شرکت اسپیسایکس
او شرکت اسپیس ایکس را ۱۴ سال پیش و با رؤیای بزرگ ایجاد اجتماعات انسانی در مریخ راه اندازی کرد، حالا به نظر می رسد همه چیز برای تحقق این رؤیا محقق شده باشد.
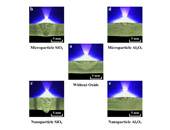
بهبود اتصالات جوشکاری در صنایع هوافضا و خودروسازی با نانوذرات
پژوهشگران دانشگاه تهران با بهرهگیری از نانوذرات روشی را برای ایجاد اتصالات جوشی مقاوم برای صنایع خودروسازی، حملونقل ریلی و هوافضا عرضه کردند.

آزمایش موفقیتآمیز هواپیمای شخصی الکتریکی دانشگاه مونیخ آلمان
مبتکران دانشگاه مونیخ آلمان با پشتیبانی و سرمایهگذاری سازمان فضایی اروپا موفق شدند نخستین پرواز یک هواپیمای نمونه عمود پرواز را، که برای استفاده شخصی طراحی شده است، با پیروزی پشت سر بگذارند.

آشنایی با ربات ماهنورد جدید «آئودی»
شرکت خودروسازی آئودی در نمایشگاه بینالمللی خودرو در دیترویت از ماهنورد جدیدی رونمایی کرده که از سیستم مشهور چهار چرخ محرک Quattro استفاده میکند. ماهنورد Quattro در حال حاضر یک ربات چاپ سهبعدی است که از تیتانیوم و آلومینیوم ساخته شده و 35 کیلوگرم وزن آن است.

معرفی فناوری های برتر سفر نمایشگاه CES 2016/بالگرد الکتریکی اختصاصی
یک شرکت چینی به نام Ehang نمونه اولیه یک بالگرد الکتریکی را رونمایی کرد که قادر است تا ارتفاع 3500 متری از زمین بلند شود و با سرعت 100 کیلومتر در ساعت حرکت کند. این بالگرد با هر بار شارژ قادر است 23 دقیقه در هوا پرواز کند.