
















چالشهاي آزمايش پرواز هواپيماهاي بدون سرنشين
هواپيماهاي بدون سرنشين يكي از فنّـاوريهاي در حال توسعه و مورد توجه ارتش و نيز برخي شركتهاي تجاري ميباشند. اين هواپيماها چالشهاي دشواري را براي مراكز آزمايش و ارزيابي پيش رو ميگذارند. ارتش علاقهمند است تا بر روي هواپيماهاي بدون سرنشين كاملاً خودكار، براي كاهش ملزومات مهارت اپراتور و افزايش قابليت اطمينان سيستمهاي تاكتيكي متمركز شود.
چالشهاي آزمايش پرواز هواپيماهاي بدون سرنشين
وارن ويليامـز
شركت علوم هوافضـا
ميكائيل هريس
مركز مهندسي سيستم و ارزيابي
دانشگاه جنوب استراليـا
مترجم: عليرضا عليحسيني
چكيده
هواپيماهاي بدون سرنشين (UAV: Unmanned Air vehicle) با بيش از 200 نوع پرندهي مورد استفاده در جهان، همچنان يكي از فنّـاوريهاي در حال توسعه و مورد توجه ارتش و نيز برخي شركتهاي تجاري (نظير شركتهاي اكتشاف معدن) ميباشند. اين هواپيماها چالشهاي دشواري را براي مراكز آزمايش و ارزيابي (T&E: Test and Evaluation) پيش رو ميگذارند. ارتش علاقهمند است تا بر روي هواپيماهاي بدون سرنشين كاملاً خودكار، براي كاهش ملزومات مهارت اپراتور و افزايش قابليت اطمينان سيستمهاي تاكتيكي متمركز شود. در اين مقاله فرض ميشود كه سطح بهينهاي از كنترل وسيلهي هوايي توسط يك "نيروي انساني در چرخه"، در مقابل عمليات كاملاً خودكار براي هدايت مأموريتهاي ويژه وجود دارد. اگر چه ممكن است خودكار بودن سيستم مناسب باشد، امّا محدوديتهاي عملي ممكن است موجب نيازهاي خاصي در سيستم شود. به دليل اين محدوديتهاي عملي، سطحي از كنترل دستي براي كنترل ارتفاع و ناوبري، به كارگيري شيوههاي اضطراري در پرواز و حفظ فاصلهي عبور و مرور (مخصوصاً در محدودهي هوايي غير نظامي) مورد نياز ميباشد. تمام اين نيازها بايد به عنوان قسمتي از مجموعهي سيستم آزمايش شوند. مؤلفان اين مقاله، معتقدند كه مأموريت هواپيماهاي بدون سرنشين و محموله بايد ملزومات خودكار شدن را تعيين كنند و اين موارد مستقيماً بر آزمايش و ارزيابي تأثير خواهند گذاشت. تأكيد اين مقاله بر اين است كه رويكرد نظاممند به هنگام توسعهي سيستم هواپيماهاي بدون سرنشين و طرحريزي برنامهي آزمايش و ارزيابي آن، لازم است. موضوعات مورد بحث در اين مقاله از تجربههاي نويسندگان در پروژهي جاريِ توسعهي هواپيماهاي بدون سرنشين براي شركتهاي اكتشاف معدن استراليا به دست آمده است.
مقدمه
هواپيماي بدون سرنشين را ميتوان به اين شكل تعريف كرد: "وسيلهي هوايي بدون اپراتور انسانيِ مستقر در كنار صفحهي كنترل هواپيما كه نيروهاي آيروديناميكي را براي پرواز و رسيدن به حالت مطلوب و مسير غير بالستيك تحت كنترل خودكار يا از راه دور به كار ميگيرد تا محمولههاي حساس (خطرناك) و غير حساس را حمل كند" (لَكس و سوذِرلَند، 1996، پي.2). تا چند سال اخير، عمدهي كاربرد هواپيماهاي بدون سرنشين در شناسايي و مراقبتهاي نظامي بوده است. امّا اخيراً گرايشهاي جديدي به اين هواپيماها به دليل پيشرفتهاي فنّاورانهي مدرن در زمينهي مواد بدنهي هواپيما، سيستمهاي هدايت، پيشرانه و محمولههاي تأثيرگذاري كه انتظار ميرفت دستيابي به آن پيچيدهتر باشد، به وجود آمده است.

شكل1- طبقهبندي هواپيماهاي بدون سرنشين (مطابق لَكس و سوذِرلَند،1996)
هواپيماهاي بدون سرنشين مدرن، به سمت هواپيماهايي با قابليت بالا و كنترل پرواز كاملاً خودكار گرايش دارند (وُنگ، 1997). با بيش از 200 نوع هواپيماي بدون سرنشيني كه هماكنون در جهان مورد استفاده قرار ميگيرند (ويليامز، 2002 اِي، پي. 6)، تنوعي از كاربردها شامل موارد زير براي اين پرندهها وجود دارد:
-
كاربردهاي نظامي:
شناسايي؛
تجسس؛
سامانهي مسلح شده؛
هدف كنترل از راه دور؛
فريب؛
مخابرات و رلهي ارتباطي.
-
كاربردهاي تجاري:
اكتشاف معدن؛
ارتباطات؛
مراقبتهاي خطوط جريان قوي؛
گشتزنيهاي ماهيگيري؛
نظارتهاي محيطي.
-
كاربردهاي تحقيقاتي:
تحقيقات جوّي؛
هوش مصنوعي؛
تحقيق و توسعهي سيستمهاي هوافضايي.
-
حركت به سوي خودكار شدن
اگر چه سيستم طبقهبندي قابل قبولي از هواپيماهاي بدون سرنشين وجود ندارد، امّا ميتوان آنها را برحسب سيستم كنترل و قابليت استفادهي مجدد طبقهبندي كرد (همچنان كه در شكل 1 آمده است). به طور كلّي، با به وجود آمدن پيشرفتهاي فنّـاوري، روند هواپيماهاي بدون سرنشين از توسعهي هواپيماهاي بدون سرنشين كنترل شونده از راه دور ( RPV: Remote Piloted Vehicle) به سمت توسعهي هواپيماهاي خودكار بوده است. به هر حال، برخي از مأموريتهاي ويژه (نظير اكتشاف معدن)، در كنار شرايط كنترلي خاص اين هواپيماها (خصوصاً براي پرواز در مناطقي كه هواپيماهاي مسافري پرواز ميكنند)، نيازهاي بيشتري را براي توسعهي هواپيماهاي كنترل از دور ايجاد كرده است.
مأموريتهاي ويژه
هواپيماهاي بدون سرنشين، به طور متداول، براي مأموريتهايي ويژه طراحي و توسعه يافتهاند. به منظور تعادل مشخصات پرنده با تجهيزات محموله، برايند سيستمهاي پرنده براي مأموريتهاي خاص ميباشد و سازگاري آنها براي انواعِ ديگرِ مأموريت، اگر غير ممكن نباشد، مشكل است.
نمونه: اكتشاف معدن
كاربرد هواپيماهاي بدون سرنشين در فعّاليتهاي هوايي اكتشاف معدن يك نمونهي خوب از مأموريتهاي ويژه براي پرندههايي با چنين پيچيدگي است. استفاده از آرپيويها براي چنين مأموريتهايي، يك پيشرفت قابل قبول نسبت به روشهاي زمينپيمايي سنتي (كه با استفاده از هواپيماي بال ثابت و سيستمهاي مبني بر هليكوپتر صورت ميگيرد) ميباشد. مأموريتهايي كه به طور نمونه، به وسيلهي هواپيماي بال ثابت و هليكوپترها صورت ميگيرند به طور ذاتي خطرناك هستند؛ به دليل اينكه چنين پروازهايي عموماً در ارتفاعات پايين و سرعتهاي كم صورت ميگيرند. نمونههاي زيادي (ماتيوس، ميشل اِت آل.، 2002) ازحوادث زيانبار و بعضاً كشنده كه در استراليا و خارج از آن اتفاق افتاده است به عنوان يك نتيجهي مستقيم از پروازهاي اكتشاف معدن، وجود دارد.
هواپيماهاي بدون سرنشين براي اهداف اكتشاف معدن يك چالش ويژه را پيش رو قرار ميدهند كه براي سيستمهاي توسعه داده شدهي ديگر و براي مأموريتهاي ديگر وجود ندارد. اين وسايل ويژه براي مأموريت ارتفاع كم (ارتفاعهاي كمتر از 400 پا) طراحي شدهاند كه براي اين ارتفاع، اغتشاشات، موانع زميني و ارتباطات فركانس راديويي (فركانس بالا) به عنوان يك چالش محسوب ميشوند. البته طراحي بدنهي هواپيما به گونهاي كه حداقل تأثير ناسازگار را روي حسگر داشته باشد، نسبتاً ساده است.
محدوديتها
1- ناوبري
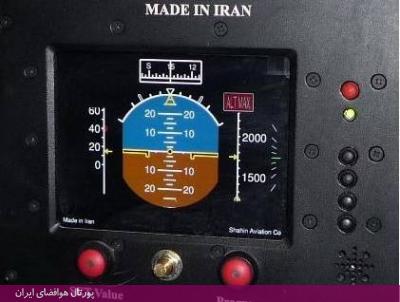
مأموريتهاي اكتشاف معدن مبتني بر هواپيماهاي بدون سرنشين، ملزومات خاصي را مربوط به ناوبري (بر حسب دقت مسير، انتهاي پرواز و طرحريزي پرواز) ميطلبد. اين محدوديتها اصولاً به ايمني پرواز و ملزومات لازم براي تهيهي دادههاي دقيق زمينپيمايي مربوط ميشود. از نقطه نظر ايمني پرواز و قابليت انجام كار، لازم است تا مكان، ارتفاع، مسير حركت و سرعت هواپيما را در تمام اوقات دانست. طراحي نمايشگر اصلي پرواز در پايگاه زميني بايد عمل نمايش نقشهي تهيه شده توسط جيپياس را كه اين اطلاعات را به علاوهي موقعيت محل برخاست ارائه ميدهد، فراهم كند.
تفاوت اصلي اكتشاف با هواپيماهاي سرنشيندار و بدون سرنشين، در ملزوماتِ لازم براي ايمني از سقوط در طول انجام مأموريت ميباشد. محدوديتهاي خاتمه ي پرواز در بسياري از موارد، همان محدوديتهاي مربوط به موشك هستند كه در آزمايش و ارزيابي به كار گرفته ميشوند. در بسياري از موارد، اين محدوديتها با سطوحي از عمليات كه در "نوتيس تو اِيرمن" (NOTAM) شرح داده شد مطابق خواهند بود. علاوه بر ملزومات ناوبري زمان واقعي، لازم است كه امكانات برنامهريزي پرواز موجود باشند تا وضعيت جغرافيايي زمين و ملزومات شبكهي زمينپيمايي را براي تهيهي پوشش فركانسهاي راديويي (RF: Radio Frequency) بهينه براي اندازهگيري كنترل، تفسير كنند. آزمايش اين قابليتها به تركيبي از آزمايش پروازهاي شبيهسازي شده و دقيق نياز خواهد داشت. در اين فاز از آزمايش پرواز، كنترل انساني بهترين انعطافپذيري را با استفاده از فركانس راديويي مناسب فراهم ميكند.
2- ارتفاع
مأموريتهاي متعارف اكتشاف معدن، در ارتفاعات كم انجام ميگيرد (عموماً زير 400 پا از سطح زمين) كه محمولهي حسگر، دادهها را با دقت بهينه فراهم ميسازد. مشكلات فراواني در هنگام پرواز پرنده در نزديكي سطح زمين به وجود ميآيد كه اجتناب از موانع محيطي كمترين آنها ميباشد. همچنين برخي از چيزهايي كه كمتر آشكار هستند پرواز در ارتفاعات كم را مشكل ميكنند؛ اين مشكلات شامل گردبادهاي كوچك (كه به ويلي- ويليز مصطلح است) و جريان هاي گردبادي شديدي ميشود كه ميتواند سبب از دست رفتن كنترل هواپيما شود (خصوصاً مواقعي كه W/S هواپيما كم باشد). اين موارد محدوديتهاي عملياتي واقعي هستند كه در موقعيتهاي بيشماري به وسيلهي سامانههاي مبتني بر هليكوپتر و بال ثابت آزمايش شده است. در اين سامانهها، از دست دادن كنترل به وسيلهي اپراتور آزمايش شده است. الزامات طراحي سيستم كنترل هواپيماهاي بدون سرنشين داراي اهميت ويژهاي است. توسعهي چنين سيستم كنترلي كه از عهدهي تركيبهاي زيادي از ارتفاع هواپيما و مسير پرواز برآيد، بسيار پيچيده است. راه حل سادهتر، وارد كردن كنترل نيروي انساني با نمايشگرهاي پرواز (كه اطلاعات اختصاصي را براي اجتناب از ارتفاعات پروازيِ غير مطلوب فراهم ميسازد) است. اگر چه هنوز انتظار ميرود كه از دست دادن وسيلهي هوايي در شرايط دشوار اتفاق خواهد افتاد.
جنبهي ديگر پرواز در ارتفاع كم شامل قابليت حفظ ارتفاع نسبت به زمين است. به منظور داشتن ارتفاع ثابت نزديك سطح زمين لازم است تا شيوههايي به كار بسته شود كه بتواند بر برجستگيهاي گوناگون زمين كه در بسياري مناطق زمينپيمايي وجود دارد، فايق آيد. چنين سيستمي بايد از عهدهي پستي و بلنديهاي زمين، بوتهها و درختان، تختهسنگها، صخرههاي برون آمده و پرتگاهها بر آيد. اين كار، براي سيستمهاي كنترل خودكار، چندان ساده نيست. آزمايشهاي عملي نشان داده است كه سيستمهاي كاملاً خودكار در چنين محيطهايي چندان خوب كار نميكنند. هر چند سيستم هدايت فرمان خلبان، غير از راهنماييهاي ديداري و دستياري خلبان خودكار، با موفقيت براي سالهاي زيادي در عملياتهاي مبتني بر هليكوپتر به كار گرفته شده است. اين فنّاوري ممكن است به تدريج در هواپيماهاي بدون سرنشين نيز مورد استفاده قرار گيرد.
بايد توجه داشت كه تجربه و فهم روشن از مأموريت و محيط عملياتي پرواز براي تهيهي تصميمهاي طرح لازم است. براي نمونه، در پروژهي جاري براي اكتشاف معدن، مشخصات مأموريت هواپيماهاي بدون سرنشين بر پايهي تجربهي تيم طراحي با بيش از 1000 ساعت پرواز زمينپيمايي توسط بال ثابتهاي مختلف و سامانههاي مبتني بر هليكوپتر كه در ارتفاع پايين عمل ميكردند، صورت گرفته بود (ويليامز، 2002 اِي).
3- خرابيهاي سيستم
سيستم آرپيوي در معرض بسياري از خرابيهاي مختلف است كه ميتواند شامل سيگنالهاي مخابراتي آپلينك (كانال مخابراتي كه سيگنالها را از ايستگاه زميني به ماهوارهي مخابراتي يا فرستندهي هوايي منتقل ميكند) و داونلينك (كانال مخابراتي كه سيگنالها را از ماهوارهي مخابراتي يا فرستندهي هوايي به ايستگاه زميني منتقل ميكند) ، موتور، الكترونيك، سيستم كنترل پرواز، عملگرها و مولدهاي موجود در پرنده شود. مهمترين خرابي مربوط به ارتباطات آپلينك و داونلينك است كه منجر به لغو پرواز بعد از يك دورهي زماني خاص خواهد شد. مطابق گواهينامهي صلاحيت پرواز استاندارد، بيشتر خرابيهاي ديگر ميتوانند از طريق سيستمهاي جايگزين و پشتيبان اصلاح گردند. به عنوان مثال، واماندگي سيستم اندازهگيري مبتني بر جريان هوا ميتواند از طريق تدارك وسايل لازم اختلاف ارتفاع جيپياس و دادههاي سرعت زميني، اصلاح گردند (اين اطلاعات به قدر كافي دقيق هستند كه "هواپيما را به مقصد برسانند"). به علاوه، اگر هر يك از سطوح كنترل دچار خرابي شود، آنگاه آرپيوي ميتواند توسط سيستمهاي ثانويهي پرواز، مأموريت خود را ادامه دهد. آزمايشهاي اخير نشان داده است كه اين كار به طور رضايتبخشي ميتواند كاربرد شبيهساز پرواز را اثبات كند (ويليامز ،2002اِي).
طرح نمايشگر پرواز در شكل 2 به نمايش در آمده است. اين شكل، ملزومات به كار بردن ميزان مناسب از دادههاي پرواز به اضافهي هشدار و اخطار سيستمها را در صورت خرابي و يا خروج از حدود تعيين شده، نشان ميدهد. در بعضي موارد براي راهنمايي خلبان پرواز، سه نمايشگر پشتيبان از دادهها فراهم ميشود. همچنين بايد به اين نكتهي مهم بايد توجه كرد كه هيچ تلاشي براي كاملاً خودكار كردن سيستم صورت نگرفته است؛ بلكه تنها اقداماتي براي تهيهي ميزان مناسبي از دادهها براي خلبان و تدارك ميزان مناسبي از دستياري خلبان خودكار، صورت گرفته است.

شكل 2- نمايشگر اوليهي پرواز
4- مديريت فضاي هوايي
مأموريتهاي اكتشاف معدن معمولاً در محيط هوايي كنترل شده و بعضاً در فضاهاي دورتر اتفاق ميافتد. به بيان بهتر، عملياتها معمولاً در ارتفاع پايين صورت ميگيرند تا حسگرهايي كه روي وسيلهي پرنده نصب شدهاند توانايي تحليل اطلاعات را داشته باشند. با اين وجود ملزوماتي وجود دارد كه هواپيماهاي بدون سرنشين مطابق مقررات وضع شده براي مناطق هوايي غير نظامي عمل كنند. در استراليا، مرجع ايمني هوانوردي غيرنظامي (CASA: Civil Aviation Safety Authority) مقررات ويژهاي را براي عمليات هواپيماهاي بدون سرنشين وضع كرده است (2001). اگر چه اين قانونها در جهت عمليات هواپيماهاي بدون سرنشين تجاري ميباشد، فعاليتهاي آزمايش پرواز نيز به مجوز نياز خواهند داشت؛ يعني اپراتور، به گواهينامهي اپراتور سياياساي نياز خواهد داشت. اين مسأله مستلزم آن است كه اپراتور، مجوز خلباني را با ارزيابيهاي مناسبي داشته باشد و توسط مراكز تعمير و نگهداري معتبر با مقررات عملياتي ثابت پشتيباني گردد. بنابراين توسعهي هواپيماهاي بدون سرنشينِ كاملاً خودكار، بدون توانايي استفاده از كنترلِ (نظارت) فعال براي هر يك از موانع ترافيكي، يا اتمام پرواز، كار سادهاي نيست. به علاوه، دارندهي گواهينامه ملزم است تا اين ارزيابيها را بر روي قابليت پرواز هواپيماهاي بدون سرنشين (تا زماني كه لازمند) انجام دهد. بنابراين عليرغم ميزان خودكار بودن كنترل هواپيماهاي بدون سرنشين، اپراتور هنوز به يك سطح متعارف از مهارت و آزمايش و توانايي استفاده از كنترل فعال پرواز، در صورت لزوم، نياز خواهد داشت.
آزمايش و ارزيابي هواپيماهاي بدون سرنشين
1- نيازهاي واقعي آزمايش پرواز
آزمايش پرواز هواپيماهاي بدون سرنشين، ارزيابيهاي بيشتري را نسبت به ارزيابيهاي معمول براي عملكرد سيستم ميطلبد. در صنعت هوانوردي وسيلهي هوايي بر مبناي مشخصات پرواز، كارآيي پرواز و سودمندي ارتباطات هوايي ارزيابي ميشود (مدرسهي آزمايش خلباني ملّي، 1995). اگر چه پيكرهبندي وسيلهي پرنده، مهمترين مولفهي سيستم هواپيماي بدون سرنشين است، امّا نهايتاً اين عملكرد سيستم است كه تعيينكنندهي توانايي سيستم در انجام موفق عمليات خواهد بود (عملكرد سيستم شامل دو پارامتر مهم هزينهها و ايمني پرواز نيز هست). بنابراين، قابليت اطمينان سيستم، همراه با مشخصات پرواز، كارايي پرواز، و سودمندي ارتباطات هوايي، يك ارزيابي مهم عملكرد سيستم ميباشد.
قابليت اطمينان سيستم تعيينكنندهي نرخ از دست رفتن هواپيماها، كميت توليد، ملزومات تعمير و نگهداري و در نتيجه هزينههاي عملياتي و قابليت دوام سيستم ميباشد. به علاوه ميزان خودكار بودن هواپيما، قابليت اطمينان سيستم را نسبت به حوزههاي مختلفِ وابسته به رشد فنّـاوري تعيين خواهد كرد. اينكه آيا كنترل خودكار ميتواند قابليت اطمينان سيستم را به طور قابل توجهي افزايش دهد به عوامل بسياري وابسته است و نميتوان بدون اطلاعات جزيي از سيستم در مورد آن اظهار نظر كرد. اگر چه، ميتوان گفت كه قابليت اطمينان سيستمهاي پيچيده نميتوانند بدون آزمايش ساختاري بررسي گردند. اين يك معماي مهندسي كلاسيك است كه در صورت فقدان دادههاي قابليت اطمينان يك سيستم، نميتوان ارزيابي خوبي را از مسائل اقتصادي سيستم ارائه كرد. به علاوه، گردآوري دادههاي قابليت اطمينان، ريسك آزمايش پرواز را تا حد قابل توجهي كاهش ميدهد. اين موضوع، يكي از مهمترين مشكلات پيش روي آزمايش پرواز هواپيماهاي بدون سرنشين ميباشد.
2- چالشهاي پيش رو
علاوه بر قابليت اطمينان سيستم، ديگر چالشهاي آزمايش پرواز مربوط به حوزهاي از تكنيكهاي آزمايش پرواز براي هواپيماهاي سرنشيندار ميشود كه ميتواند در هواپيماهاي بدون سرنشين به كار رود. آزمايش پرواز هواپيماهاي بدون سرنشين ميتواند به قسمتهاي كلاسيك مشخصات پرواز، عملكرد و ارزيابي ارتباطات هوايي، كه پيشتر به آن اشاره گرديد، تقسيم شود. در سطح ارزيابي مشخصات پرواز، چالشها به نبود پسخورد نيروي سيستم كنترل دستي، نبود پاسخ نوساني و ارتعاشي، و حساسيتهاي كنترل طولي، سمتي و عرضي (بيشتر به دليل اندازهي كوچك هواپيما) مربوط ميشوند. اين حساسيتهاي كنترل، شبيه مشكلات هواپيماهاي دستساز خانگي (Homebuilt) كوچك است.
در زمينهي عملكرد، آسيبپذيري بالاي هواپيما از تندباد و اغتشاشات جوي باعث ايجاد مشكل در پايدارسازي هواپيما ميشود. محدوديتهاي عمودي و عرضي محدودهي هوايي باعث ايجاد نياز به تكنيكهاي جديدي در آزمايش پرواز ميشود. هر چند گزينههايي براي افزايش محدوديتهاي عمودي از طريق NOTAM وجود دارند. با توجه به چالشهاي خلباني هواپيماهاي بدون سرنشين، يكي از مسائل مهم تعيين سطح خودكاري سيستم كنترل در هنگام طراحي آن است. اين مسأله تابعي از مأموريت و محدوديتهاي مالي نيز ميباشد. به علاوه، به دليل طبيعت تجهيزات و محدوديتهاي فنّـاوري نمايش، تهيهي قالبهاي نمايش پرواز ممكن است به طور كامل از تمرينهاي متداول هوانوردي پيروي نكنند. در فقدان چنين نمايش پروازهايي و حساسيتهاي طبيعي كنترل (به دليل اندازهي فيزيكي كوچك) لازم است تا اين مسأله كه آيا هواپيما عملكرد و مشخصات پرواز رضايتبخشي دارد يا نه بررسي شود. همچنين محمولهي حسگر ممكن است به نرخ اختلالات كوچك حساس باشد كه اين موضوع خود عاملي براي پيادهسازي خلبان خودكار ميباشد. بنابراين مشخصات پرواز طولي و عرضي- سمتي هواپيما و چگونگي اجراي خلبان خودكار، تأثيرات قابل توجهي بر كيفيت دادهها و در نتيجه كارايي مأموريت خواهند داشت.
3- وسايل آزمايش
سطوح ديگري كه توجه كافي به آن نشده است زيربناهاي زميني لازمي است كه آزمايش پرواز و آزمايش زميني سيستم هواپيماهاي بدون سرنشين ميبايد در آن انجام شود. البته لازم به ذكر است كه به دليل وجود سيستمهاي ارتباطي از هواپيما به زمين و بالعكس، ديگر نيازي به مكانهاي خاص براي اندازهگيري موقعيت، ارتفاع، جهت و سرعت هواپيما نيست و ميتوان اين پارامترها را به وسيلهي حسگرهايي كه در خود پرنده نصب ميشود مستقيماً اندازهگيري كرد و به مركز زميني ارسال نمود. ناحيهي آزمايش بايد در محيط هوايي كنترل شدهي غيرنظامي قرار گيرد و نبايد در محيط ساختماني و يا محيطهايي كه داراي موانعي نظير خطوط نيرو، سازهها و يا درختان بلند هستند باشد. زمان لازم براي انتقال به ناحيهي آزمايش و برگشت از آن نيز موضوع مهمي است و نقش قابل توجهي را در انتخاب ناحيهي آزمايش بازي ميكند؛ چرا كه آزمايش و ارزيابي عملياتي مستلزم انتقال هواپيماهاي بدون سرنشين به محدودهي آزمايش كه معمولاً در ناحيهاي دوردست واقع شده است، ميباشد.
سطوح ديگري كه معمولاً در آزمايش و ارزيابي هواپيماهاي بدون سرنشين مطرح نشده است، تست تونل باد و انجام آناليز آيروديناميكي ميباشد. در نمونهي اكتشاف معدن كه در اين مقاله به آن اشاره شده است، استفاده از ابزارهاي مدلسازي آيروديناميكي مبتني بر نرمافزار براي تهيهي بيشترين داده به منظور توسعهي طراحي بال، كافي بود. اگر چه اين ابزارهاي نرمافزاري قادر نبودند تا ممانهاي مفصل سطوح كنترل آيروديناميكي (ايلرون، اليويتور و رادر) را پيشبيني كنند. ممان مفصل آيروديناميكي يك پارامتر مهم است، زيرا كميتي است كه اندازهي بار تحميلي بر عملگر را مشخص ميكند. ممان مفصل بزرگ، به قدرت زياد عملگر نياز خواهد داشت و همچنين تأثير معكوس بر قابليت اطمينان عملگر (به دليل كششهاي متداول) خواهد گذاشت. اگر چه روشهاي تونل باد ميتوانند يك تقريب مرتبه اول از اين پارامتر فراهم كنند، امّا به طور كلي آزمايش پرواز، قابل اطمينانترين روش است. قدرت زياد مورد نياز عملگر، همچنين بر قابليت اطمينان تأثير ميگذارد. تيم پروژهي توسعهي هواپيماهاي بدون سرنشين براي اكتشاف معدن، واماندگي عملگر را كه در طي آزمايش سطح كنترل پيش از پرواز رخ ميدهد، آزمايش كرده است. اين واماندگي، آغازگر فعاليتهاي وسيعي براي آزمايش عملگرها در زمين بود. البته كار آزمايش عملگر همچنان در حال ادامه است و پيش از اين موجب چندين تغيير كه به طور بالقوه قابليت اطمينان عملگر را بهبود خواهند بخشيد، شده است.
روشهاي پيشنهاد شده
1- آزمايش پرواز
قوانين معروف و سرانگشتي در زمينهي طراحي هواپيما بيان ميكند كه نبايد موتور آزمايش نشده در بدنهي آزمايش نشده تست شود. آزمايش و ارزيابي توسعهاي سيستم هواپيماي بدون سرنشين با بدنهي آزمايش نشده و ارتباطات هوايي آزمايش نشده و ايستگاه كنترل زميني آزمايش نشده، پيچيدهتر شده است. به علاوه، موتوري كه در هواپيماهاي بدون سرنشين به كار برده ميشود معمولاً مبني بر سطح فنّـاوري هواپيما است كه بسته به كاربرد و شكل مأموريت، تفاوت قابل توجهي دارند. اين مسأله، مجهولات ديگري را در معادلهي آزمايش وارد ميكند. به طور خلاصه چهار عنصر اصلي سيستم وجود دارند كه بايد با تغييرات پلهاي، هركدام با ميزان ريسك مختلف، تست شوند.
چگونگي نزديك شدن به مسألهي فزايندهي يكپارچهسازي زيرسيستمهاي مختلف، با توجه به قيود فني مختلفي كه مسأله را همراه با ريسك ميسازند، كليد موفقيت (يا عدم موفقيت) در برنامههاي آزمايش پرواز است. برنامههاي آزمايش به گونهاي طراحي ميشوند كه در ابتدا آزمايشهاي كم خطر و سپس آزمايشهاي پرخطرتر انجام گيرند.
نقشهي كلي آزمايش و ارزيابي (TAMP: A Test and Evaluation Master Plan) يك ملاك كامل به كار رفته براي هماهنگ كردن فرايند آزمايش است. تيايامپي بايد آزمايش پرواز را به فازهاي "آزمايش و ارزيابي توسعهاي" و "آزمايش و ارزيابي عملياتي اوليه" (IOT&E: Initial Operational T&E) تجزيه كند. آزمايش و ارزيابي توسعهاي، مشخصات پرواز هواپيما، عملكرد پرواز و نمايش پرواز را در بر خواهد گرفت؛ در حالي كه آزمايش و ارزيابي عملياتي اوليه، ارزيابيهاي عناصر اجراي مأموريت را شامل خواهد شد. فرم مأموريت و محدوديتها، ساختار برنامهي آزمايش را از طريق طراحي قالب آزمايش پرواز و انتخاب مهارتهاي آزمايش پرواز، تعيين ميكند (براي مثال، رجوع شود به ويليامز).

شكل 3 - هواپيماي بدون سرنشين تـِرِيـنـِر
تعيين تعداد هواپيماهاي لازم براي برنامهي آزمايش پروازِ نسبتاً پرخطر، مشكل است؛ زيرا دادههاي قابليت اطمينان واقعي در دسترس نيستند. در نبود اين دادهها، اين موضوع تا حدي با روندهاي پيشين انجام شده است. به عنوان نمونه معمولاً سه بدنه براي آزمايشهاي پرواز مورد استفاده قرار ميگيرد. در شكل 3 اولين هواپيمايي كه براي شركت در اكتشاف معدن به كار گرفته شد، آمده است.
برنامهي آزمايش زميني جامعي در رابطه با برنامهي آزمايش پرواز وجود دارد كه حوزهي اتصال دادههاي فركانس راديويي، سيستمهاي اتمام پرواز، عملكرد سيستمهاي الكترونيكي، فعاليت موتور، سازگاريهاي الكترومغناطيسي، تعادل و وزن بدنه و كيفيت نرمافزار نمايش پرواز را اداره ميكند. اگر چه تمركز اين مقاله روي اين مسأله نيست، اما اين جنبه از آزمايشها نيز بايد با آزمايش و ارزيابي توسعهاي يكپارچه شود.
شبيهسازي در تمام اين سطوح نقش مهمي را ايفا ميكند. كاركرد خلبان خودكار نيز، وابسته به ميزان مهارت لازم براي هدايت عناصر اجراي مأموريت، به طور پلهاي اضافه شده است.
2- شبيهسازي پرواز
الگوي رياضي هواپيماهاي بدون سرنشين به طور گستردهاي در برنامههاي توسعهاي استفاده شده است. يك الگو از اين نمونه ميتواند براي برنامهريزي آزمايش پرواز، خرابي سيستمها، ارزيابي خلبان خودكار، توسعهي شيوههاي حالت واماندگي و اضطراري و ارزيابي مشخصات پرواز عملياتي به كار رود. نمايي از نرمافزار شبيهسازي پرواز در شكل 4 نشان داده شده است.
نرمافزار شبيهسازي پرواز، اين قابليت را دارد كه برجستگيهاي زمين، عوارض محل برخاست و فرود هواپيما، شرايط اتمسفر (باد، اغتشاشات و دماي هوا)، خرابيهاي تجهيزات ارتباطات هوايي و موتور مبتني بر احتمالات آماري، و چگونگي كار خلبان خودكار را مدلسازي كند.

شكل 4 -مدل هواپيماهاي بدون سرنشين "ترينـر" در محيط شبيهسازي
شبيهسازي و نمايش پروازِ هواپيما ابزاري مهم براي پاسخ به اين سؤال است كه: "آيا هواپيما ميتواند در حالت كنترل دستي و تحت شرايط واقعي اتمسفر در ارتفاع پايين به درستي پرواز كند؟". نرمافزار شبيهساز براي مأموريت اكتشاف معدن، سطح مهارت ناوبري را تحت شرايط تندباد و هواي متلاطم در خلال اجراي پرواز كم ارتفاع زمينپيمايي، در اختيار ميگذارد.
علاوه بر آنچه گفته شد نرمافزار شبيهسازي پرواز، اطلاعات اضافي غير دسترس از آزمايش پرواز را نيز فراهم ميكند. تغيير زاويهي سطوح كنترلي هواپيما، سرعت و شتاب بدنه در 3 محور متعامد توسط اين نرمافزار قابل مشاهده و ثبت است. همچنين پارامترهاي ديگري نظير موقعيت مركز ثقل، وزن كلي، و خواص جوّي ميتواند در طي پرواز انفرادي تغيير يابد. به علاوه، ميتوان عناصر خطرناك برنامهي آزمايش پرواز را در جزييترين حالت ممكن تأمين كرد تا آزمايشهاي بيشتر، با محدوديتهاي ايمني كمتري صورت گيرد. در هر دو مورد، آرايش سختافزار پرواز ايستگاه كنترل زميني (GCS: Ground Control Station) واقعي، با سختافزار به كار رفته در ايستگاه كنترل زمينيِ شبيهسازي شده، يكسان است. بنابراين، ميتوان آزمايشهاي پرواز شبيهسازي شده را به عنوان آزمايش سختافزار در حلقه در نظر گرفت.
از ديگر مزيتهاي مهم شبيهسازي پرواز اين است كه بررسي گستردهي مشخصات پرواز، عملكرد و نمايشگرهاي پرواز ميتواند قبل از آزمايشهاي واقعي انجام گيرد [تا در صورت نياز اصلاحات لازم روي هواپيما و سيستمهاي آن انجام گيرد - مترجم]. بنابراين ميتوان نتايج شبيهسازي و دادههاي به دست آمده از سختافزار آزمايش پرواز را با هم مقايسه كرد؛ بدين ترتيب، ابزار تحليل و طراحي سودمندي براي توسعهي هواپيما در آينده فراهم خواهد شد.
جمعبندي
در اين مقاله آزمايش و ارزيابي هواپيماهاي بدون سرنشين، به خصوص آرپيويها براي مأموريتهاي ويژه، از منظر سيستمي مورد بررسي قرار گرفته است. رويكرد نظاممند به طراحي و توسعهي هواپيماهاي بدون سرنشين مستلزم نگرشي خاص به مسأله است؛ نگرشي كه در آن هواپيما فقط وسيلهاي براي رسيدن به اهداف است. طراحان و آزمايشكنندگان هواپيماهاي بدون سرنشين ميبايد به درك روشني از مأموريت و حساسيتهاي محمولهي حسگر (كه نيازهاي اندازه، شكل و عملكرد هواپيما را به اضافهي موقعيت ايستگاه كنترل زميني و روشهاي پرتاب و بازيابي تعيين ميكنند) برسند. آرپيويها (هواپيماهاي بدون سرنشيني كه توسط خلبان زميني كنترل ميشوند)، براي مأموريتهاي خاصي همچون اكتشاف معدن سودمند هستند.
ماتريس ريسك آزمايش پرواز در حالتي كه اجزاي پرنده (نظير موتور، بدنه، سيستم الكترونيك و ايستگاه كنترل زميني) از پيش به صورت جداگانه آزمايش نشده باشند بسيار پيچيده خواهد بود. آزمايش پرواز هواپيماهاي بدون سرنشين همچنين از اين نظر كه تثبيت و پايداري هواپيما حول نقطهي مورد نظر مشكل ميباشد، چالشهاي بيشتري را در بر خواهد داشت. اين چالشها خصوصاً در حالتي كه آزمايش پرنده در W/S پايين، P/W بالا و يا اينرسي كم مد نظر باشد، مضاعف خواهد شد. به علاوه، در هواپيماهاي بدون سرنشين به دليل عدم حضور انسان در پرنده، احساس شتاب، ارتعاش و ضربه به خلبان منتقل نميشود كه اين مسأله كنترل پرنده در شرايط خاص را دشوار ميكند.
در اين مقاله همچنين چالشهاي ديگري در آزمايش و ارزيابي هواپيماهاي بدون سرنشين و در مأموريتهاي خاص (مثل اكتشاف معدن) ارائه شده است. نياز به انجام عمليات (و همچنين آزمايش پرواز هواپيما) در سرعت و ارتفاع كم و با پيروي از پستي و بلنديهاي زمين مستلزم بهرهگيري از ابزار مدلسازي و شبيهسازي براي ارزيابي بخشهاي مختلف هواپيما ميباشد.
مراجع
-
Civil Aviation Safety Authority 2001, Unmanned Aircraft and Rockets, draft amendments to Part 101 of the Civil Aviation Regulations, CASA, Canberra, Australia.
-
Lax, M. and Sutherland, B. 1996, An Extended Role for Unmanned Aerial Vehicles in the Royal Australian Air Force, Report 46, Air Power Studies Centre, Fairbairn, Australia.
-
Mathews, K., Mitchell, S., and Tucknell, K. 2002, Mining Exploration Related Aviation Accidents and Incidents, unpublished report, Newmont Mining Corporation, Adelaide, Australia.
-
National Test Pilot School 1995, Introduction to Performance and Flying Qualities Flight Testing, National Test Pilot School, Mojave, U.S.A.
-
Stinton, D. 1996, Flying Qualities and Flight Testing of the Airplane, American Institute of Aeronautics and Astronautics, Reston, U.S.A.
-
Williams, W. 2002a, Research Into Unmanned Air Vehicles For Mining Exploration Applications - Quarterly Report, Quarter 1, Sir Ross and Sir Keith Smith Fund, Adelaide, Australia.
-
Williams, W. 2002b, Test and Evaluation Master Plan - Unmanned Air Vehicles For Geophysical Survey Missions, version 4, unpublished report, Systems Engineering and Evaluation Centre, Adelaide, Australia.
-
Wong, K. C. 1997, Aerospace Industry Opportunities in Australia Unmanned Aerial Vehicles (UAVs) - Are They Ready This Time? Are We? [Online, accessed 21 May, 2002]. http://www.aero.usyd.edu.au/wwwdocs /UAV_RAeS_prez_26Nov97.PDF
منبع: وبگاه موسسه رها (raha.co.ir)





 28 بهمن ماه 1404
28 بهمن ماه 1404
چگونه میتوان خلبان شد؟ 2 فروردین ماه 1404
2 فروردین ماه 1404
معماری فرودگاه: طراحی و تاثیر آن بر تجربه مسافران و عملکرد فرودگاه 24 بهمن ماه 1403
24 بهمن ماه 1403
معرفی 5 شبیهساز پرواز 11 آبان ماه 1403
11 آبان ماه 1403
لباس فضایی چیست؟ چرا فضانوردان به لباس فضایی نیاز دارند؟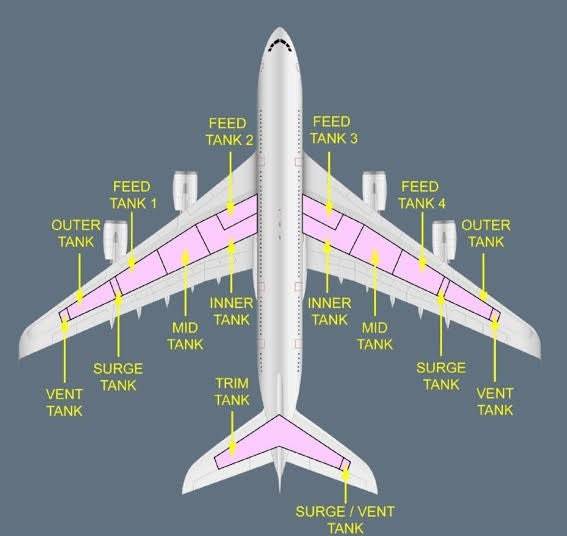 22 شهریور ماه 1403
22 شهریور ماه 1403
مخازن سوخت هواپیما 22 شهریور ماه 1403
22 شهریور ماه 1403
سوخت هواپیما چیست و انواع آن کدام است؟ (+کد سوخت)


-
کيوان انتظاری | با عرض سلام
به عنوان فردی متخصص در زمينه طراحی و ساخت هواپيماهای بدون سرنشين، متاسفانه با مطالعه مقاله فوق به اين نتيجه رسيدم که تنها چيزی که در آن بررسی نشده است، موضوع مطرح شده در عنوان مقاله است!!! اميدوارم در آينده، طرف ثبت يک مقاله هدف نويسندگان و متوليان مقالات و کنفرانسها و ... نباشد! مقاله فوق با چشم پوشی از ادبيات جملات، از سطح علمی بسيار بسيار پايينی برخوردار است. -
محمد جعفر نوری | باعرض سلام وخسته نباشید
باابراز خوشحالی ازوجود چنین پورتالی که وجودش برای دانشجویان مهندسی نعمتی بس واجب الشکر است .
خواستم تشکر کنم وتقاضاداشته باشم مقالات علمی وپایان نامه های بیشتری رادراین راستا برای بنده ارسال کنید. باتشکر - مسعودشیخی | باعرض سلام وخسته نباشید وباتشکرازپورتال خوبتان.موضوع پایاننامه ام درخصوص هواپیماهای بدون سرنشین است.اگرمحبت بفرمایید دراین خصوص مقالات علمی وکتاب معرفی کنید ممنون وسپاسگزارمیشم.